Plasma cutting alone isn’t sufficent to perform a disassembly task with little or no human intervention. Here, propose a lifting robot, as flexible to the lifting scenario as possible.
Together with the plasma cutting robot, this workflow proceeds with two robots working simultaneously to remove a steel element from a prototypical structure, following this workflow: 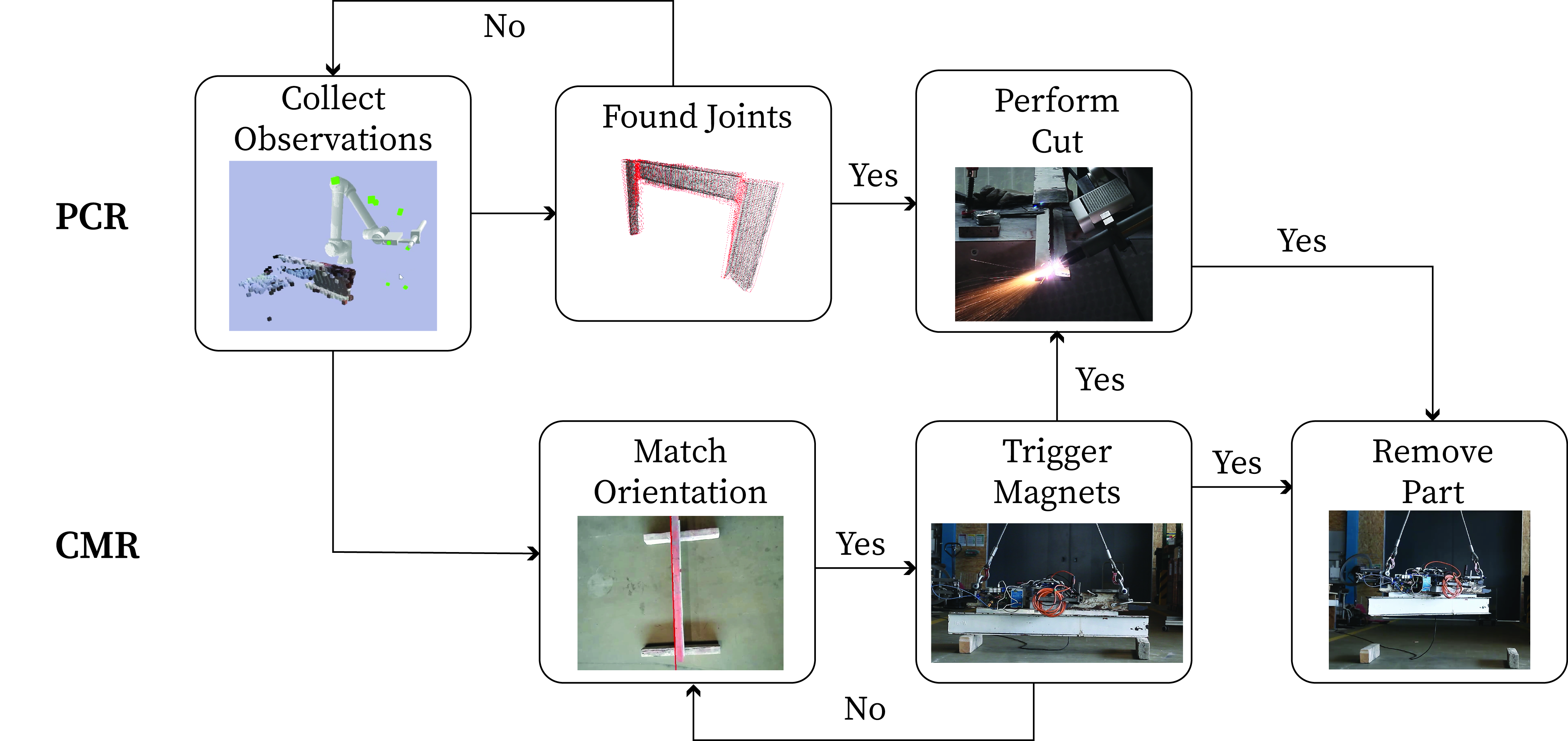 The gyroscope saturates quickly, so tilting the wheel back and forth overcomes this problem, but moving it laterally or increasing the speed and mass would also help. Residual stress in the assembly overcomes the magnets which can’t comply to the potentially non-flat workpiece. The demo had to be paused halfway through disassembly and a different set of magnets were installed.
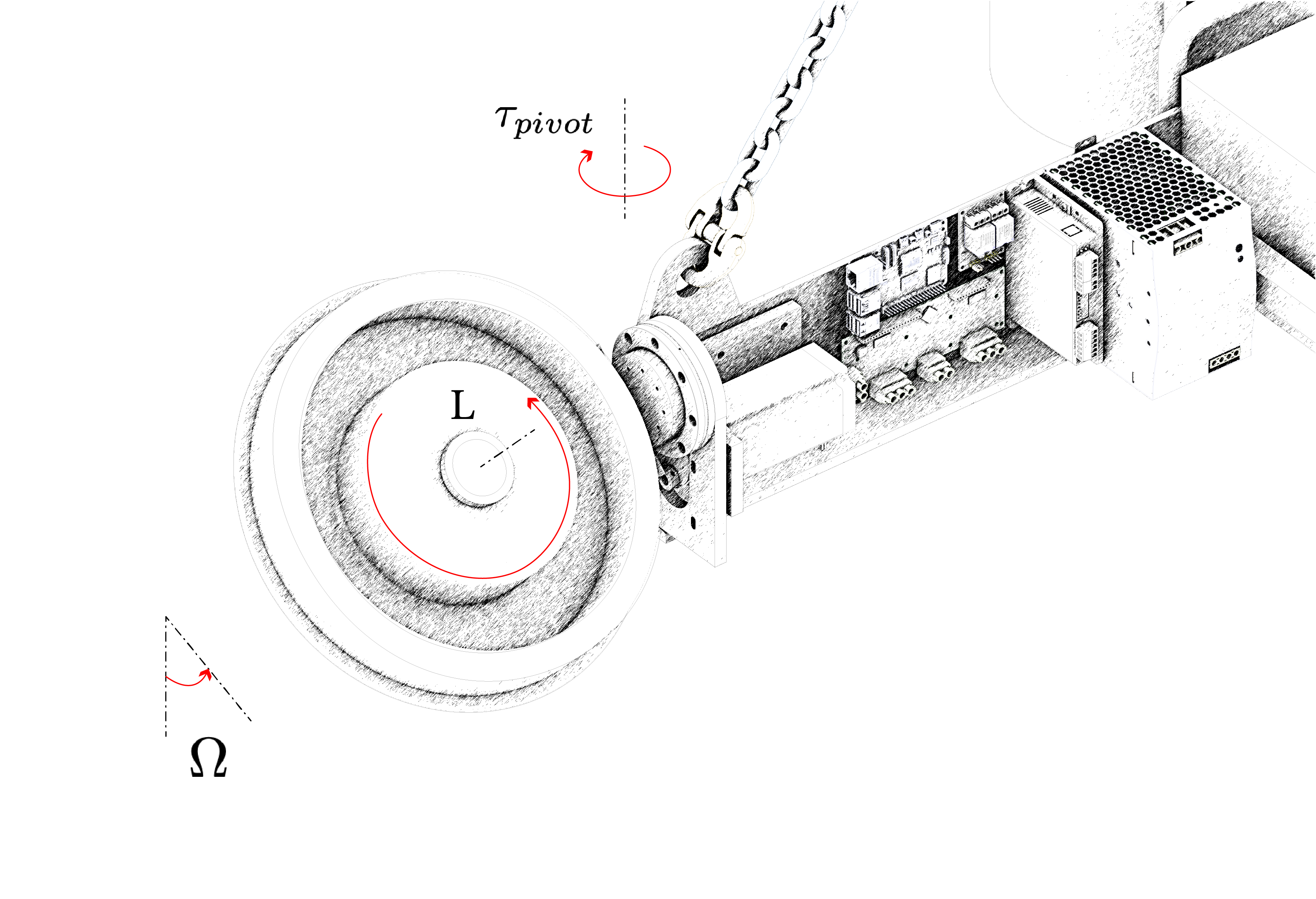
The gyroscope saturates quickly, so tilting the wheel back and forth overcomes this problem, but moving it laterally or increasing the speed and mass would also help. Residual stress in the assembly overcomes the magnets which can’t comply to the potentially non-flat workpiece. The demo had to be paused halfway through disassembly and a different set of magnets were installed.